
详细说明

这是一个简单得令人发指的机器,它唯一的用途就是帮你去拨动指尖陀螺让它高速旋转……需要用一个 Arduino 驱动舵机,把它们固定好,放置在恰到好处的位置模拟手指的拨动动作。下面是制作视频:
https://v.qq.com/x/page/s0843yeos87.html
链接表
文件库
arm big.stl
[72484 Bytes at 2019-03-10, 7 次下载]
fidgetspinner.ino
[352 Bytes at 2019-03-10, 7 次下载]
arm small.stl
[51184 Bytes at 2019-03-27, 7 次下载]
教程
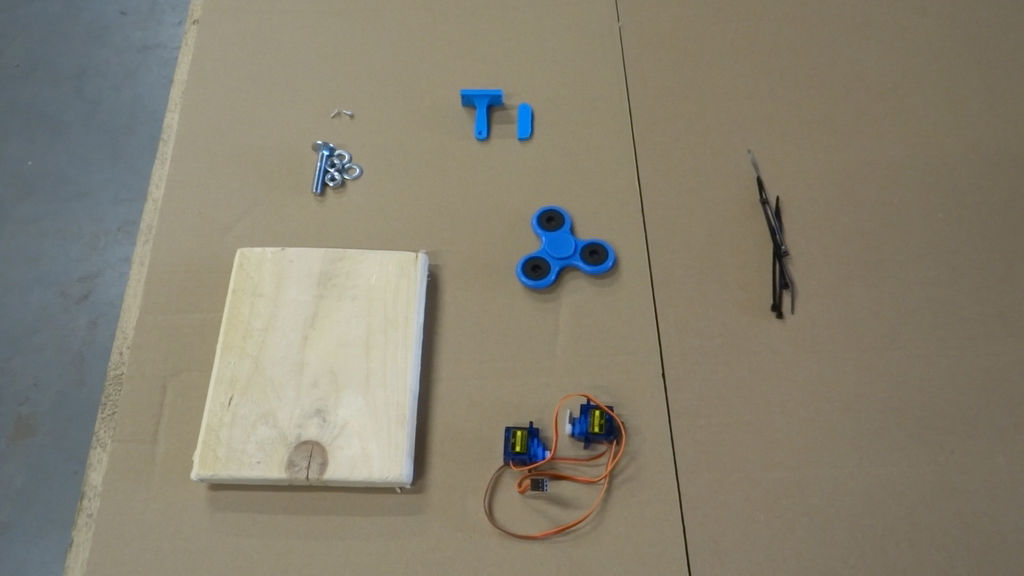
组件清单
- 指尖陀螺 × 1
- 电机 × 2
- Arduino × 1
- M10螺丝 × 2
- M10螺帽 × 2
- M10垫片 × 2
- 3D打印配件 × 2
- M2螺丝 × 2
- 拉链 × 2
- 木块 × 1
材料清单
指尖陀螺×1
电机×2
Arduino×1
M10螺丝×2
M10螺帽×2(带2个垫片)
3D打印配件×2
M2螺丝×2
拉链×2
木块×1
3D打印配件
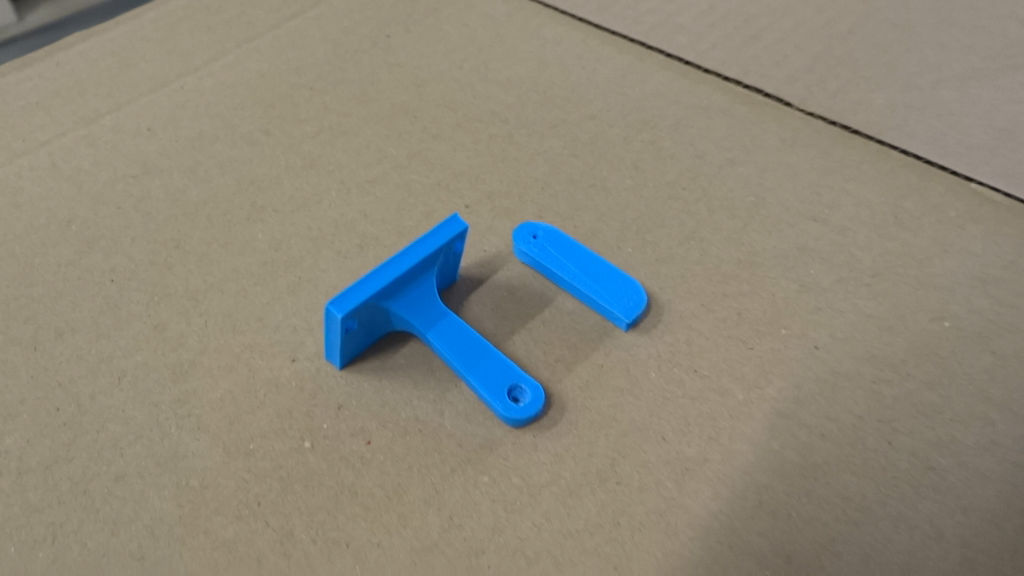
这里需要打印两个很小配件,如有你没有打印机,你也可以用木材或者塑料来代替。我选择的蓝色的PLA以便与我自己的指尖陀螺相匹配。
3D打印资源请到项目文件库中下载。
切割和钻孔工作
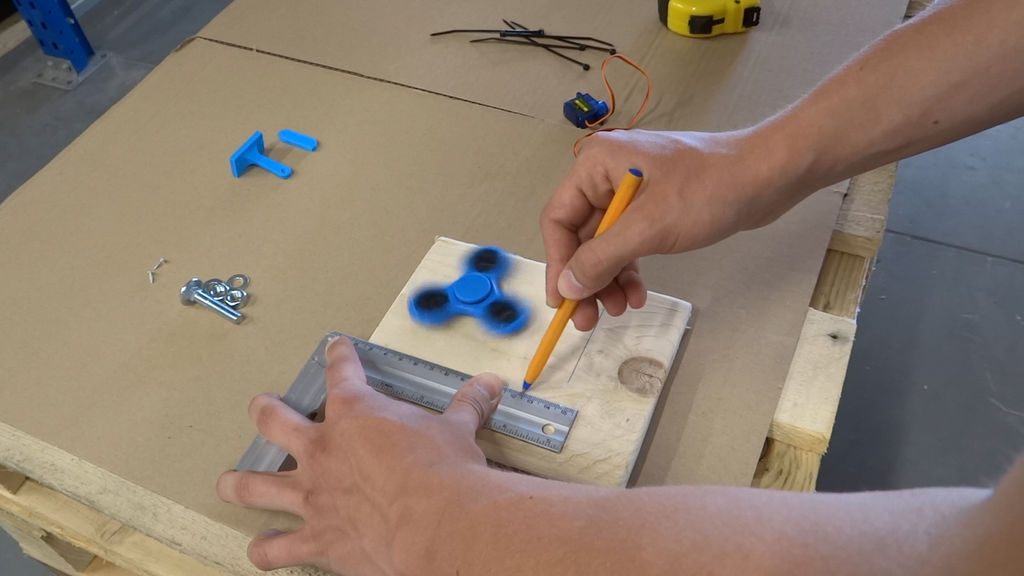

1、首先切割木材。切割出的尺寸可以放下指尖陀螺和电机(你也可以把Arduino放在木材上切割,但没有很大的必要)。
2、为M10钻孔。这个孔是为了固定指尖陀螺的,钻孔时要钻的稍微大一点,以便将螺帽隐藏起来。
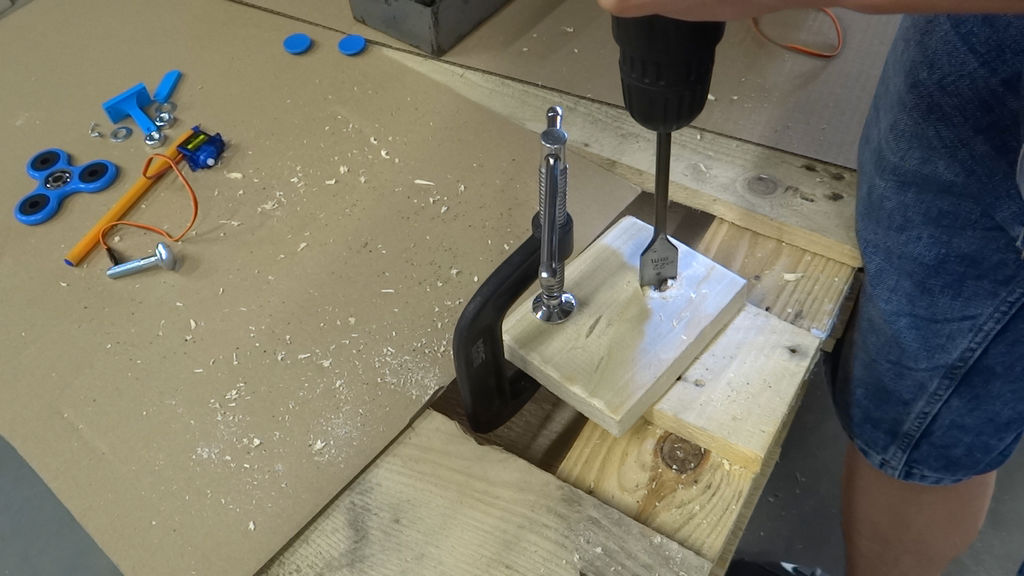
3、钻两个孔,用于固定拉链。以便让电机固定到底座上。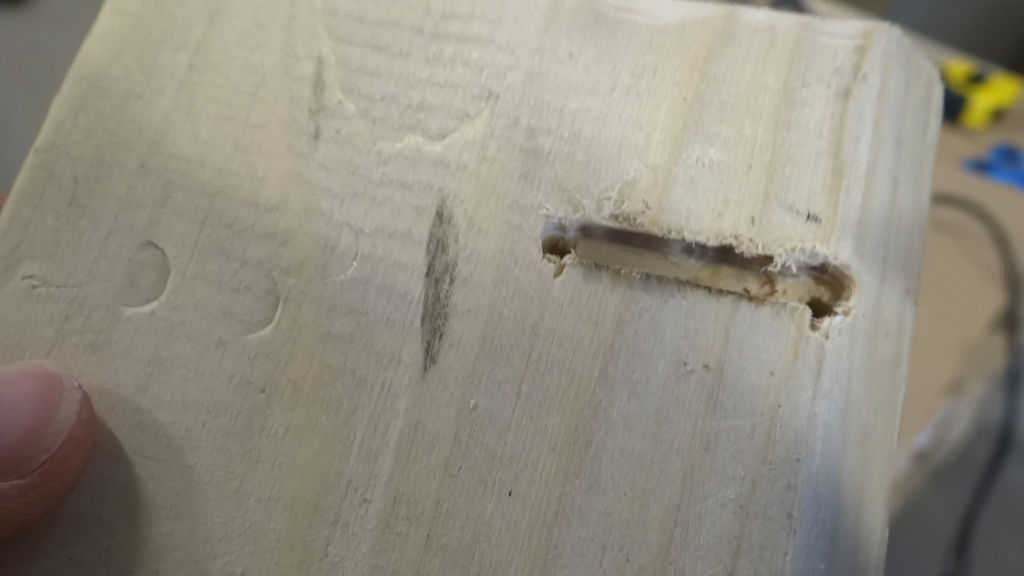


4、在木头底座上钻一个深深的孔,将另一个拉链隐藏在底座用于固定另一个电机。
组装


1、先将M10螺丝拧入到之前钻的孔中。用螺母拧紧,然后放上垫片。
2、由于指尖陀螺没有盖子,在指尖陀螺上加上螺母和垫片。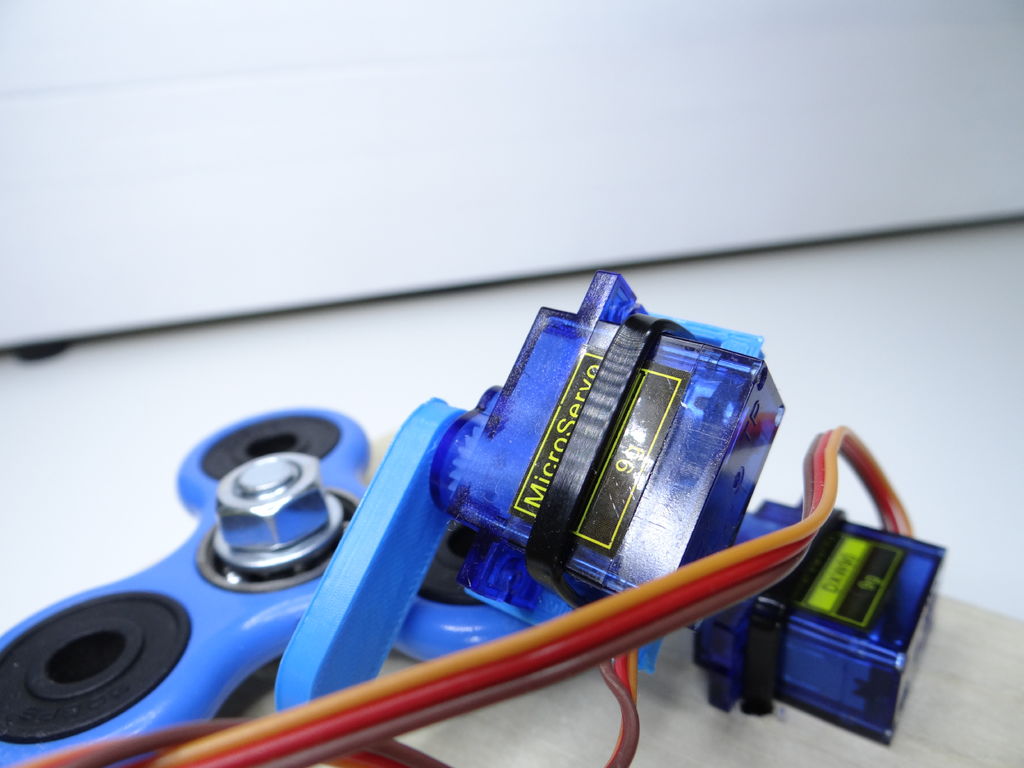
3、旋转手臂是由两个3D配件和两个电机组成的。用M2螺丝将大一点的配件与一个电机的底部固定,然后用拉链将小一点的配件与第二个电机的顶部相连。同样使用M2螺丝固定3D打印配件。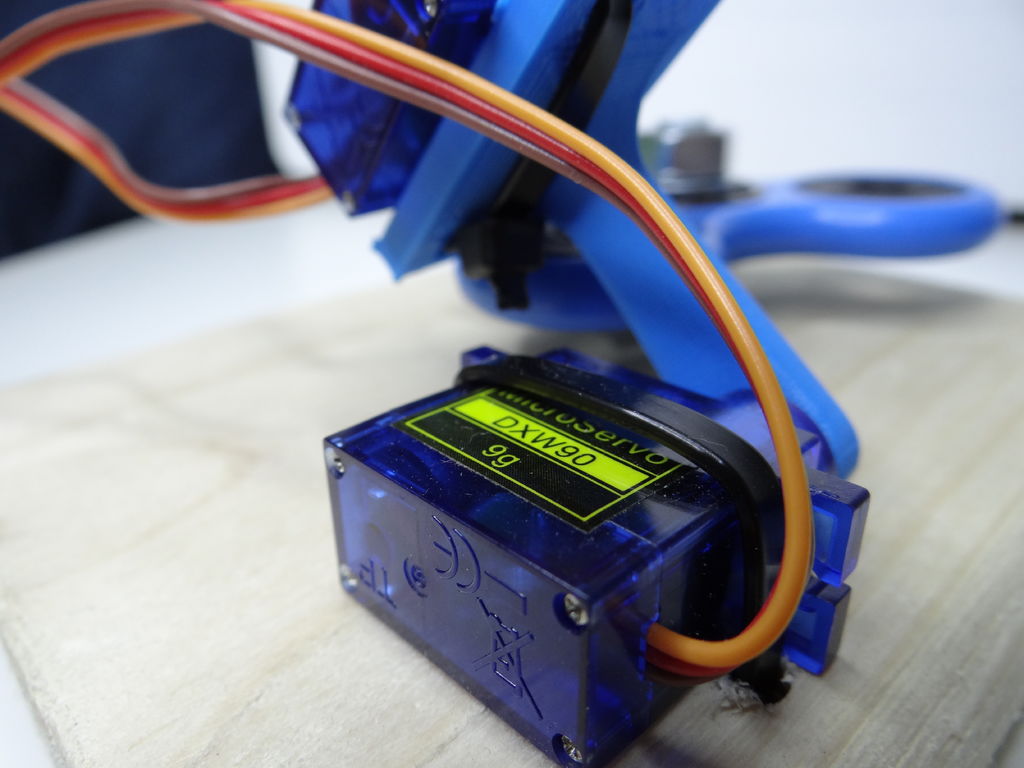
4、这条手臂用拉链固定在底座上。
安装Arduino
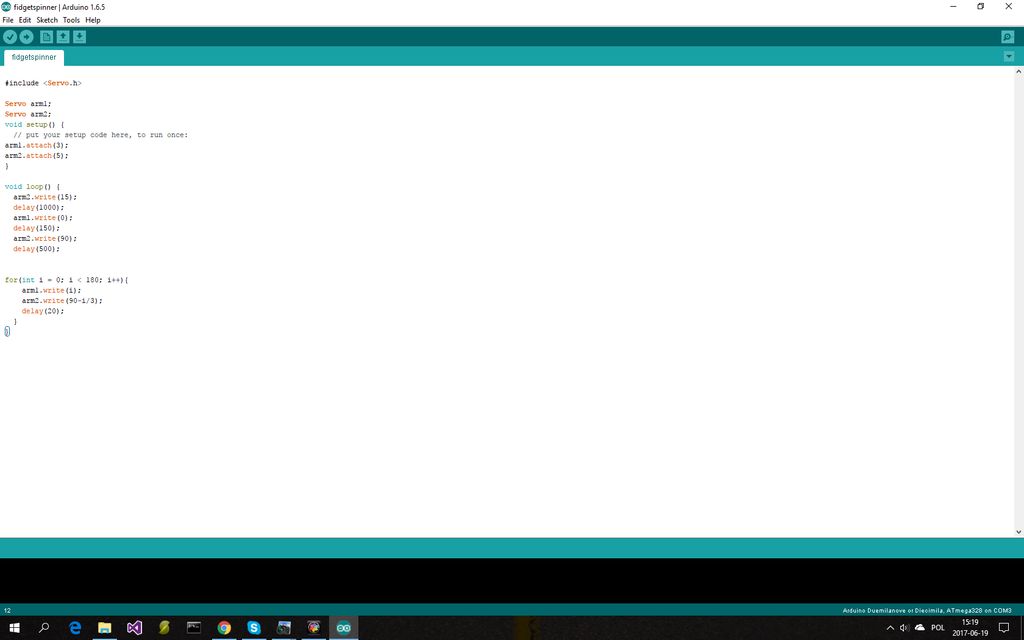
这是个非常简单的程序,只需驱动电机向前和向后移动。你不需要安装其他的库。
#include <servo.h>
Servo arm1;
Servo arm2;
void setup() {
arm1.attach(3);
arm2.attach(5);
}
void loop() {
arm2.write(15);
delay(1000);
arm1.write(0);
delay(150);
arm2.write(90);
delay(500);
for(int i = 0; i < 180; i++){
arm1.write(i);
arm2.write(90-i/3);
delay(20);
}
}连接电机
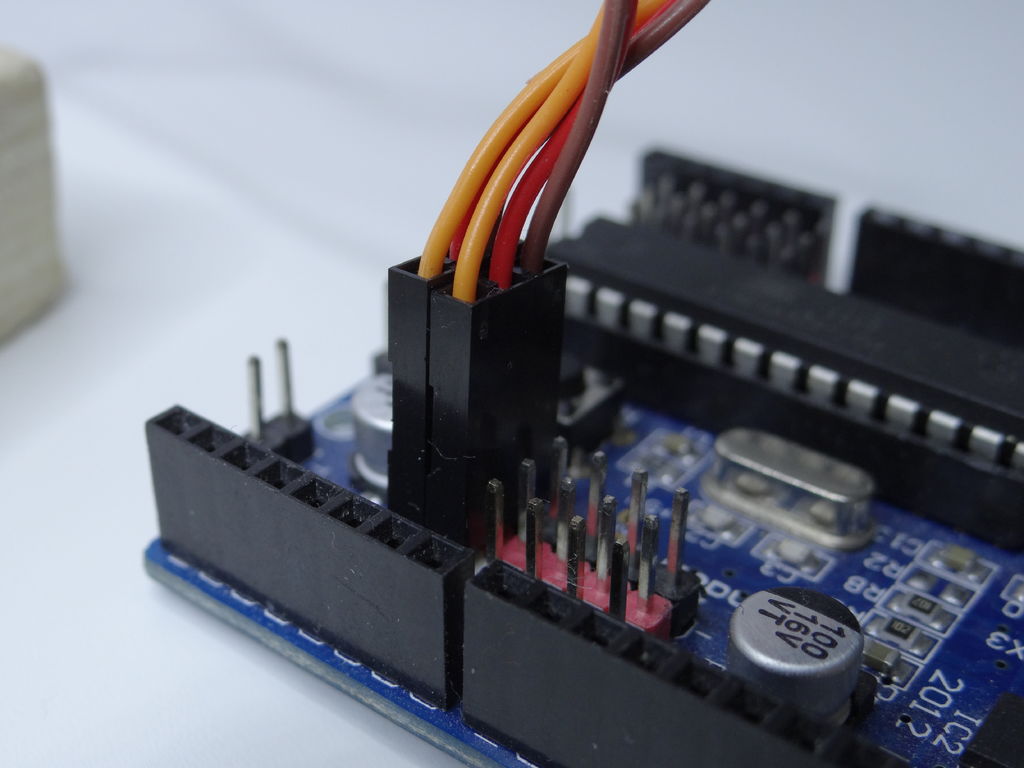
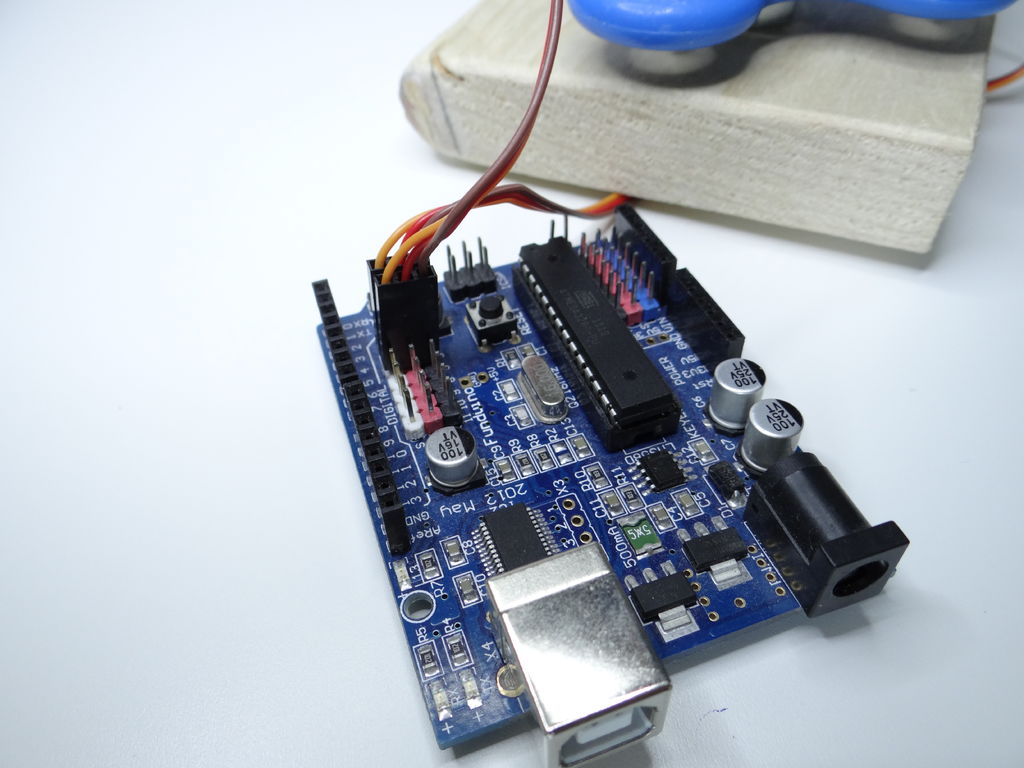
将两个电机连接到 arduino 。请注意,将电机 VCC 连接到 5V ,将电机 GND 连接到 arduino GND ,将信号连接到引脚 3 和 5 。
完成


这台不停旋转的指尖机器人做好了,美中不足的地方期待你的改良方案。