
详细说明

滑板很酷,不仅可以用来玩杂耍,还兼具代步工具的功能。那么给滑板加上一个直流电机,变成电动滑板会不会更酷呢?
下面介绍一款速度可达 40km/hr(26迈)的电动滑板,一次充电可以续航 18km,足够满足大多数人的通勤需求了。
如果你制作成功了,玩耍时一定要注意安全,记得随时佩戴头盔和必须的安全装备。另外有些城市道路上已经禁止用滑板作为代步工具了,也请遵守交规。
DIY 全过程视频:
https://v.qq.com/x/page/m09618ur5bs.html
链接表
文件库
NRF24_Skatebord_receiver.ino
[2672 Bytes at 2020-04-28, 16 次下载]
NRF24_Skatebord_transmitter.ino
[1093 Bytes at 2020-04-28, 16 次下载]
Schematic_Electric_Skateboard.pdf
[73201 Bytes at 2020-04-28, 29 次下载]
STL+for+Remote.rar
[64328 Bytes at 2020-04-28, 16 次下载]
STL+for+Battrey+Case.rar
[151588 Bytes at 2020-04-28, 17 次下载]
Saketboard+mount.stl
[92284 Bytes at 2020-04-28, 15 次下载]
Saketboard+mount+by+NematicsLab.step
[63044 Bytes at 2020-04-28, 14 次下载]
Saketboard+mount+Drawing.pdf
[106362 Bytes at 2020-04-28, 15 次下载]
教程
组件清单
- 滑板 × 1
- 感应式无刷直流电机 × 1
- 非感应式无刷直流电机 × 1
- 感应式调速器 × 1
- 非传感器调速器 × 1
- 传动皮带 × 1
- 链条传动装置 × 1
- 电机套件 × 1
- 18650 电池 × 若干
- 锂电池 × 1
- 电池仓 × 1
- 烙铁 × 1
- 焊锡丝 × 1
- 工具箱 × 1
- 锉刀 × 1
- 钻头套件 × 1
- 老虎钳 × 1
材料清单
滑板 × 1
感应式无刷直流电机 × 1
非感应式无刷直流电机 × 1
感应式调速器 × 1
非传感器调速器 × 1
传动皮带 × 1
链条传动装置 × 1
电机套件 × 1
18650 电池 × 若干
锂电池 × 1
电池仓 × 1
烙铁 × 1
焊锡丝 × 1
工具箱 × 1
锉刀 × 1
钻头套件 × 1
老虎钳 × 1
选择合适的滑板

挑选合适的滑板将其改造成电动滑板。由于滑板有许多种类的选择,选取一块合适的滑板非常的重要。
这里我选择了长板,因为它更宽、更长,而且除了带有滑轮外,平衡性更强;易于骑行和操控,适合初学者;而且有很大的空间方便添加机电部分。
电机和调速器

项目中要使用到两种类型的直流电机。一种是有刷直流电机,一种是无刷直流电机。
无刷直流电机的规格:额定电压值为 170—300V,功率为 1500-3000W。由此可见,额定电压将决定着板子有多少扭矩,额定电压越低,扭矩就越高。我的电机额定功率为 280V 和 2500W,动力还是不错的,可以承受体重为 100 公斤的人。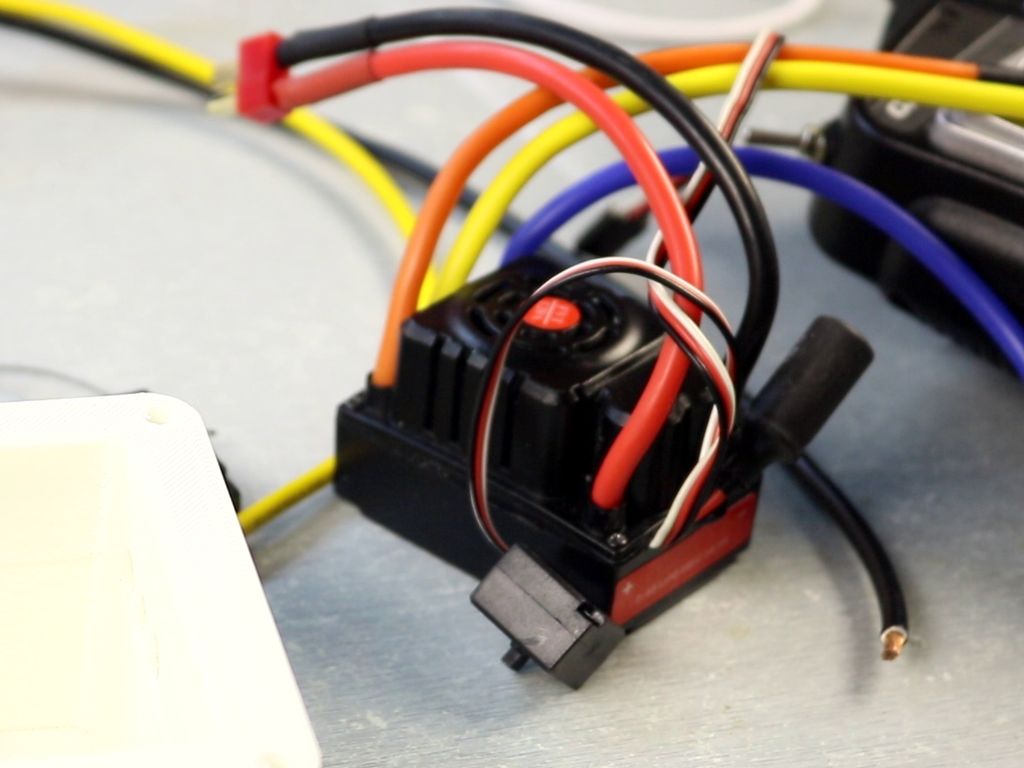
项目中,需要使用三个相位来控制速度,因此需要添加一个电子调速器。调速器相当于这个项目中的“大脑”。它连接着电池和电机。同时,它还连接着遥控器上的接收器。
电子调速器接收“命令”(PWM 信号),占空比将其传递给遥控器,并控制的油门的大小。随后,它还将控制从电池传递到电动机的电能,从而控制电机的速度。
我使用的额定功率为 24V 和 120A,根据算式功率=电压×电流,则 24×120= 2880W,电机的额定功率为 2500W,因此会有一些多余的电量。
注意:电子调速器最好选择质量好的,避免因安全问题而引起火灾。另外,如果你也可以使用 VESC (开源电调),它是电子调速器的另一个版本。
电池组
电池的电量将确定你能行驶的距离。需要与电动机兼容的电池组。

我的电池组是由 6S 3P 18650 的锂离子电池构成,六个串联的锂离子电池和三个并联的锂离子电池。电池电压为 25.2V(6x4.2)。
我的电池容量为 7800mAh。
关于如何构建电池组,你可以点击链接了解:
https://www.instructables.com/id/How-to-Make-a-18650-Li-ion-Battery-Pack/ 。
此外,你也可以使用锂聚合物电池构建电池组,但我并不建议你使用锂聚合物电池,如果处理不当,它们会很危险。
传动皮带和电机支架
滑轮和皮带
轮子、滑轮和皮带组装在一起,可以形成传动系统。滑轮与电机皮带轮的比率称为“齿轮减速比”。数值可以设定在 2.5 左右,但也可以低于 1.5或高于 3。通常情况下,速度较低的减速比更好。我使用 70mm 的滑轮,它套件的齿轮比是数值为 3 的高速齿轮。
电机支架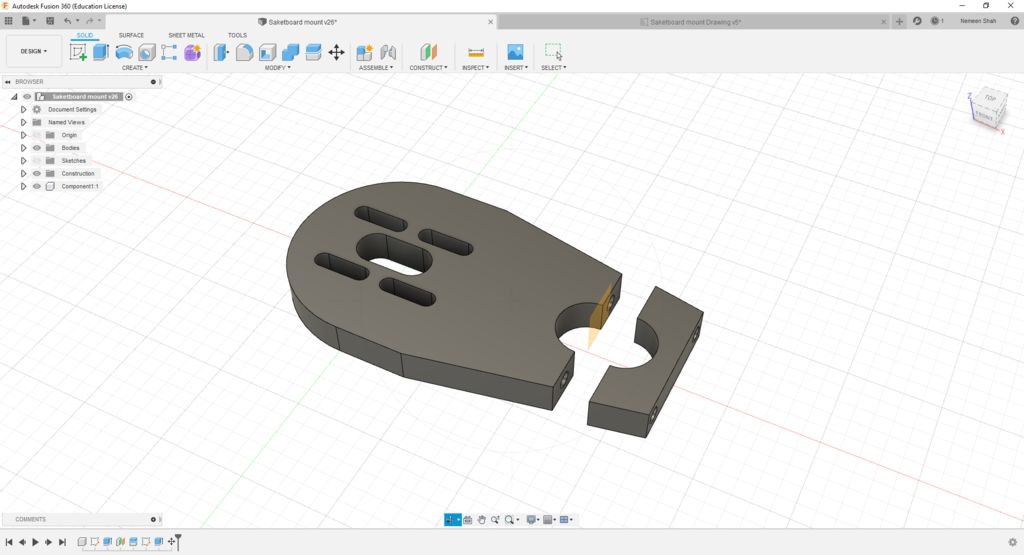
使用 Autodesk Fusion 360 设计电机支架并 3D 打印,采用分体式的夹紧设计,将其安装到长板的车轴上。同时还需要弄清楚电机和车轴之间需要滑动多大的力去拉紧皮带。


支架是由 CNC 进行制造。这是一种减法制造工艺,它采用计算机控制和使用机床去除部件上的材料层,并生产出定制的零件。使用的材料是铝 6061-T6,因为它具有高强度的特点且易于加工。
STEP 文件和 STL 文件请在项目文件库中下载。
https://make.quwj.com/project/227
动力传动系统

1、卸下右后轮,以便安装底座和电机。由于滑板的车轴有些弯曲,使用锉刀将其去除,以便电机支架能够完全适用于滑板的车轴。安装完电机支架后,使用机器螺钉安装了电机。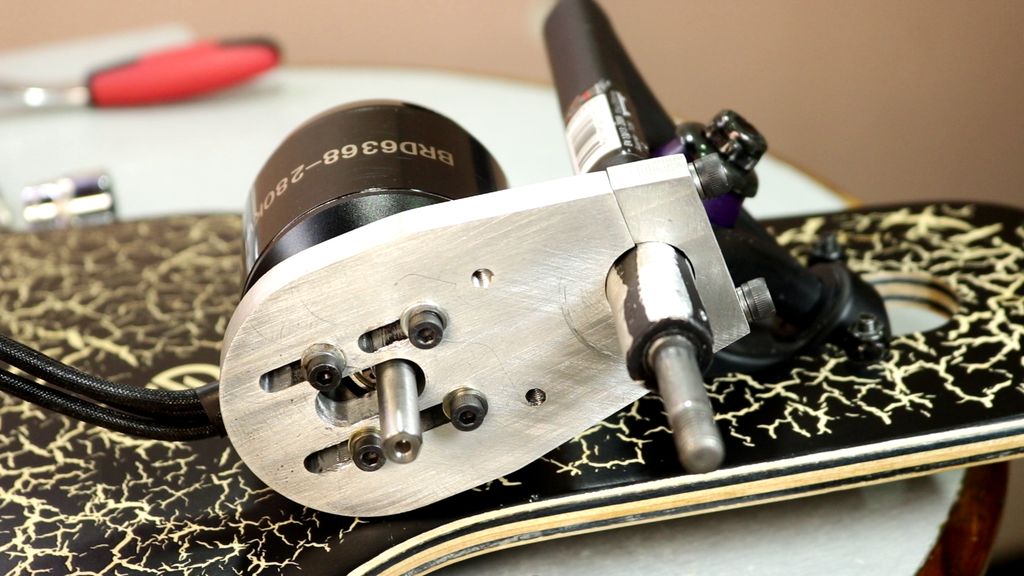
2、在车轮上增加一个滑轮,将旋转能量从电动机传递到车轮上。这个过程非常的简单,只需将较大的滑轮放置在车轮的中心,并标记需要在车轮上钻孔的洞即可。
3、打好孔后,使用机械螺钉将滑轮固定在车轮上,一定要固定到位。
4、将较小的滑轮安装在电机轴上,并将皮带与车轮一起放置,并确保它们对齐,将这三个滑轮组合在一起就形成了传动系统。
电路和 3D 打印部分
完成传动系统后,将电子调速器连接到电机上。具体方式是:将电子调速器的三根线连接到电机的三根线,然后将电池组连接到电子调速器,最后就可以将电子调速器连接到无线电接收器。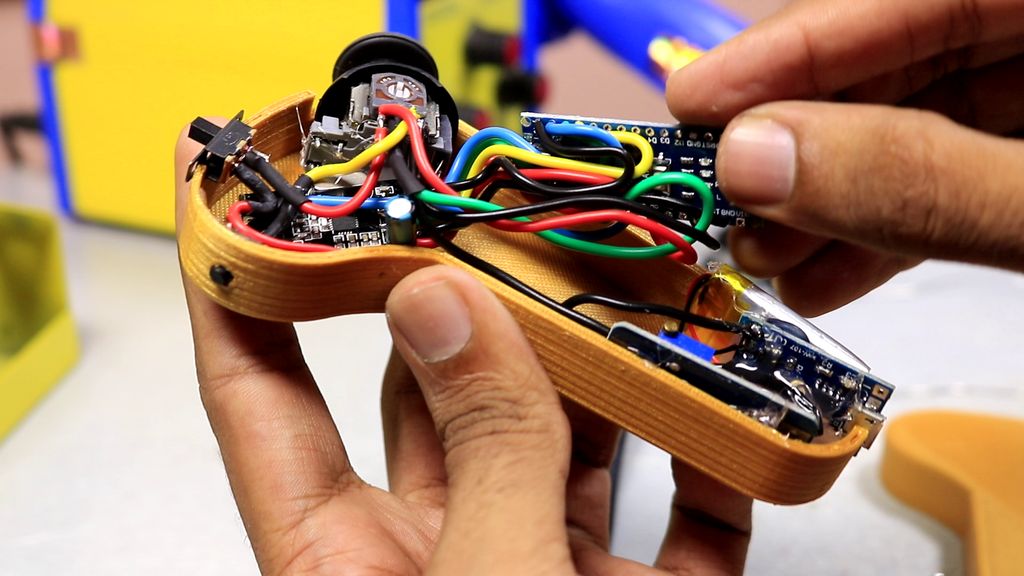
我决定使用 Arduino 和 nRF24L01 模块构建无线电控制器,你也可直接购买现货。如果你需要构建一个,可以购买以下材料进行搭建。
Arduino Nanox2
nRF24L01 模块x2
操纵杆模块x1
500mAh 1S 锂电池x1
TP4056 模块x1
开关x1
升压模块x1
3D 打印机x1

按照此步骤提供的电路连接发射器和接收器,然后将下载好的代码上传到 Arduino,然后将接收器分别连接到 Arduino 的 5V,GND 和数码针脚 5 电子调速器的 5V,GND 和数码针脚。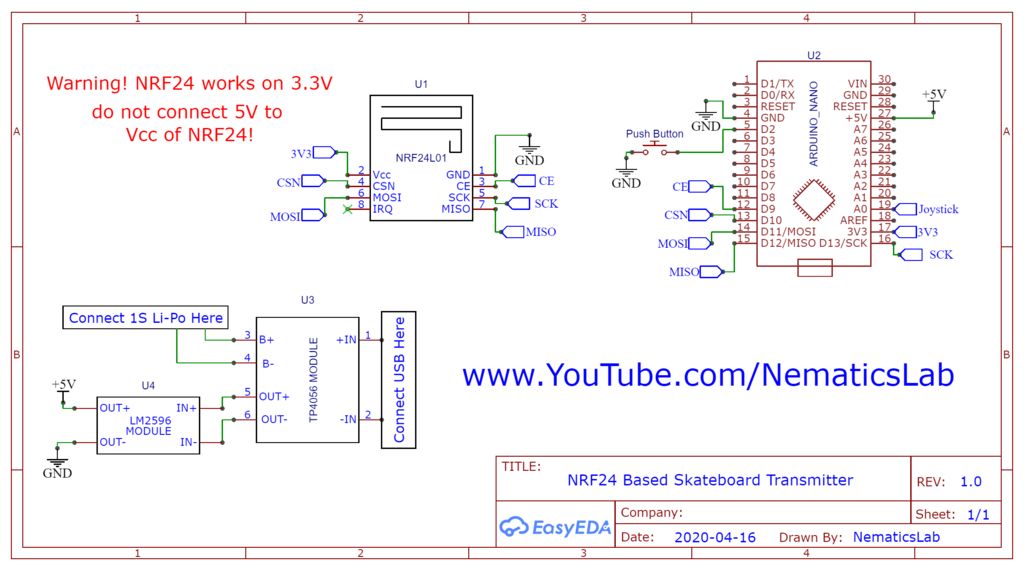

在进行接收器测试后,查看电动机是否沿着正确的方向旋转,如果不能,只需将电动机和电子调速器的任意两根线互换即可,电机就会朝另一个方向旋转。
将所有电子设备和电池放入到 3D 打印机的箱中。我定制了一个盒子,但你可以直接使用合适的塑料盒并将其安装在滑板的下方。
请下载 STL 文件和代码请在项目文件库中下载。
https://make.quwj.com/project/227
完成
现在,电子滑板就完成了。
我的电子滑板的参考数据如下:
重量:7.2 公斤。
离地间隙:7.5厘米。
最高时速:40 km/hr(速度达到 48km/hr 后,行驶会非常不稳定)。
巡航速度:25Km/hr。
行驶范围:18 公里。
电池电量: 6S 3P 锂离子电池(25.2V 7800mAh)。