
详细说明
猫咪的胡子有一项特别重要的功能就是感知环境信息。特别是在黑暗的夜晚,猫咪虽然有一定程度的夜视能力,但胡须可以帮助猫咪对陌生的环境进行感触,作用相当于盲人手中的导盲手杖。在猫咪胡须的末端有一类感应装置,能够通过触碰来对物体的质感、力量和距离进行信息收集,并将刺激信号转化为神经冲动传达到神经中枢,分析出当前的环境变化。

下面我们的项目就是参考猫须这一功能来做的——猫须式感官增强装备,装备它之后就拥有了猫主子一样的对环境的感知能力!
这个项目是由科罗拉多州博尔德分校的 Playful Computation 和 Craft Tech Lab 实验室共同开发。
链接表
文件库
New_Whiskers.ino
[4938 Bytes at 2019-09-20, 6 次下载]
教程
组件清单
- 塑料条1 × 1
- 4" 单向弯曲传感器 × 4
- JST 插头 × 若干
- 振动马达 × 4
- 压发卡 × 1
- Proto 板 × 若干
- 电线 × 若干
- 透明丙烯酸或纸板 × 1
- 热收缩膜 × 若干
- 液体钉 × 若干
- 47k 电阻 × 若干
- Nitecore 头灯带 × 1
- 魔术贴 × 若干
材料清单
塑料条× 1
4" 单向弯曲传感器×4
JST 插头×若干
振动马达×4
压发卡×1
Proto 板×若干
电线×若干
透明丙烯酸或纸板×1
热收缩膜×若干
液体钉×若干
47k 电阻×若干
Nitecore 头灯带×1
魔术贴×若干
工作原理
「猫须」为两组特制的柔性传感器,总共四,每侧两个。
1、直接获取其与环境中其他物体接触而产生的信息(弯曲的角度),然后将每个传感器接收的初始电压或者电阻信息转换为弯曲角度信息(例如,10度的弯曲角度)。
2、角度弯曲的数据被转换为 PWM 信号输出并反馈到用户前额上的振动马达。
3、每根猫须柔性传感器连接到一个 Proto 板再连接到 Arduino UNO,进行转换。
4、用户前额的四个电机的会给用户带来触觉刺激。 每一个猫须与一台电机相连,电机振动的强度基于猫须传感器设置的阈值。
组装猫须

猫须的材质需要足够灵活、有韧性。
1、将 JST 插头焊接到传感器的支脚上。
2、用硅胶将塑料条粘在传感器上并贴上热收缩膜。
3、在猫须装置的整个底座涂上 Sugru 硅胶涂层,起到保护作用。
组装猫须部件
猫须传感器完成后就可以安装到人脸颊上了。
1、打印透明猫须支架,并用激光切割机切割。使用的材料为 1/16" 透明丙烯酸树脂。
2、在支架上钻四个孔。
3、将两排针的 JST 插头穿过孔。确保孔口位置彼此相对。

4、使用 Sugru 硅胶并将 JST 插头固定在支架上。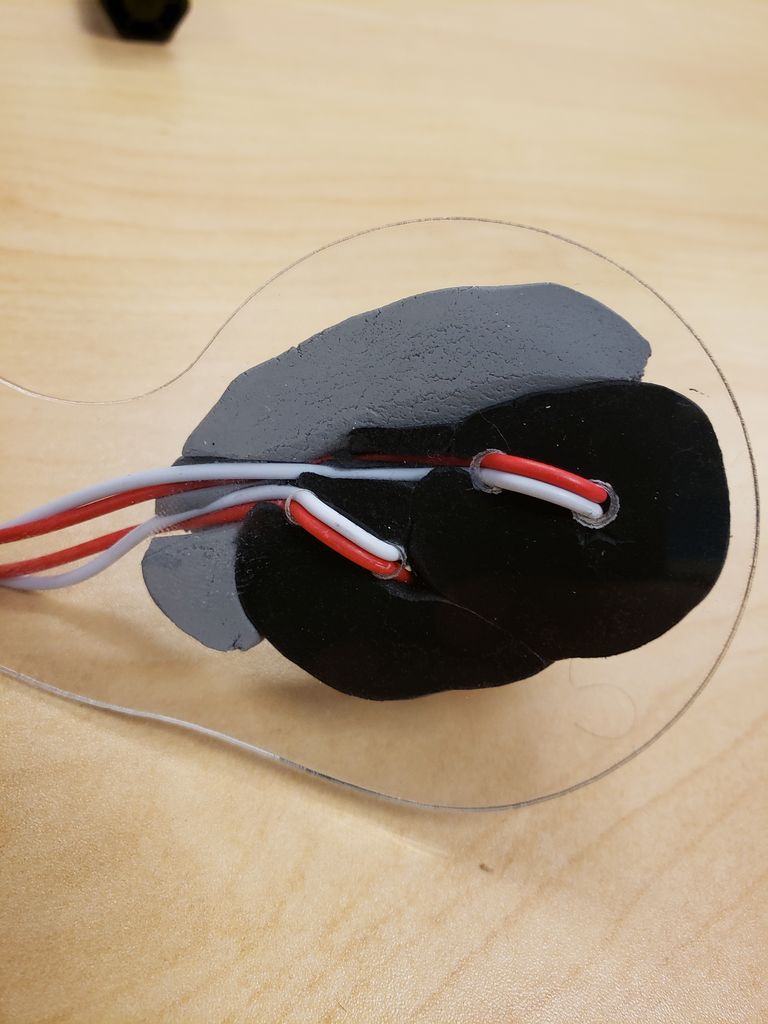
5、白线表示 3.3V,黑线表示 GND,红线表示模拟引脚。将 JST 插头的两端焊接到 1'Proto 板的一侧,另一边的猫须做同样的处理。你可以采用我的设计,创建分压器或更改布局。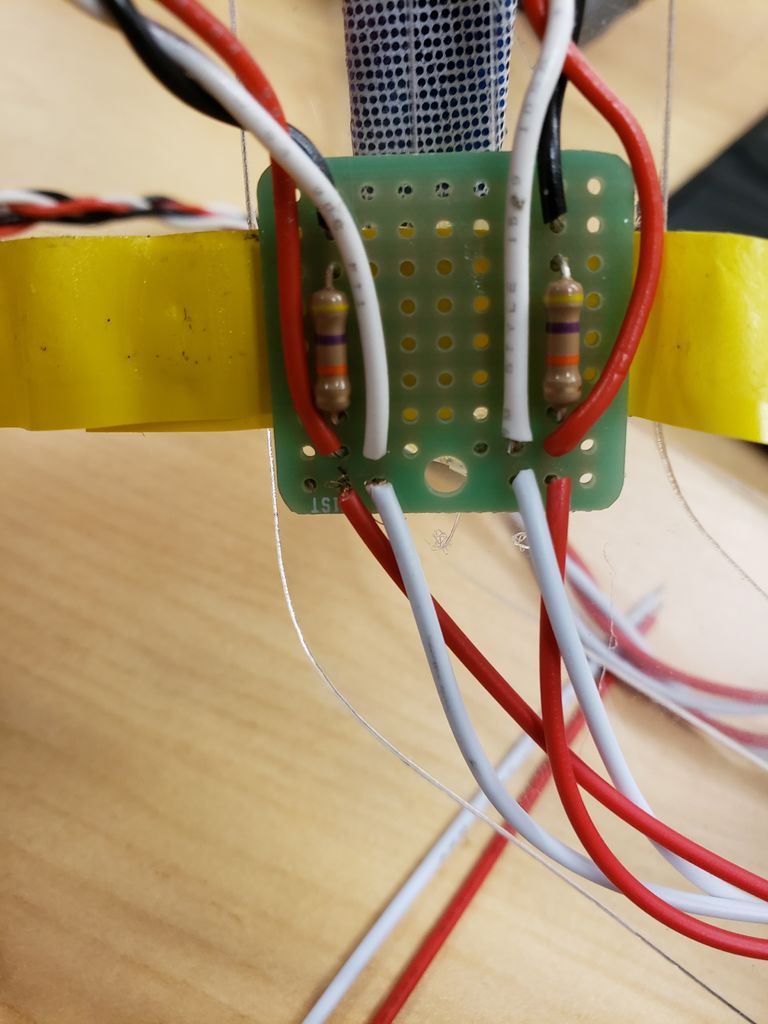

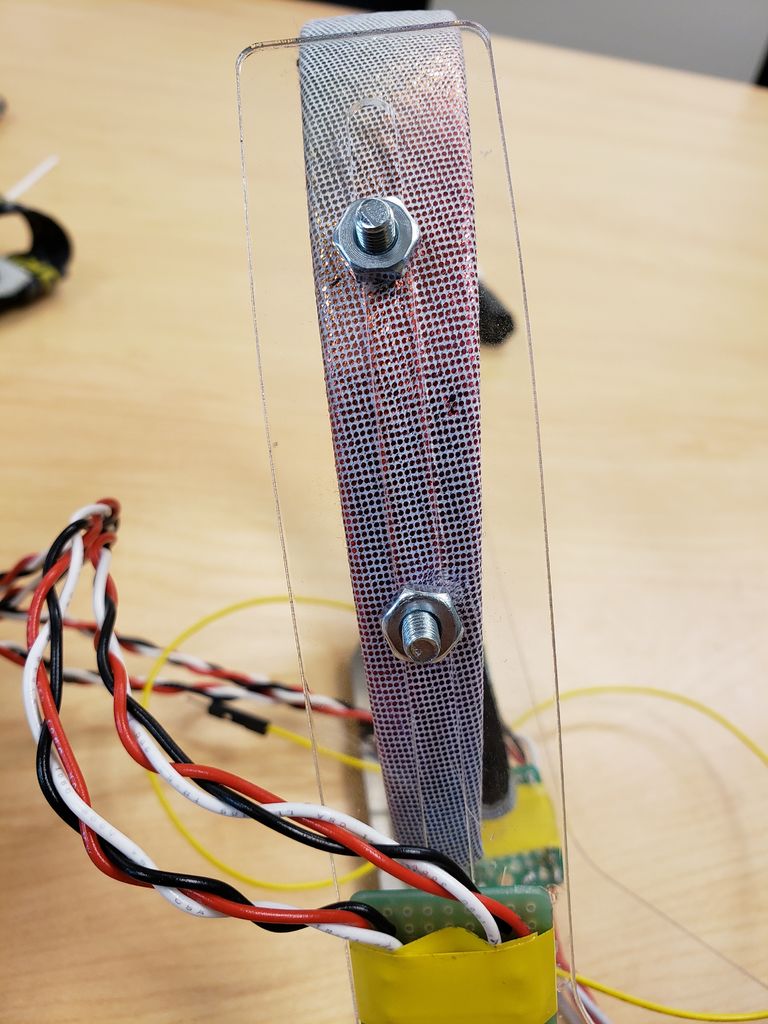
6、将支架组装到头带上。
组装振动马达
连接振动马达
将红线连接到 Arduino 上的 PWM 引脚,蓝线连接到 GND。
连接头带
1、使用魔术贴将振动马达固定在 Nitecore 头灯带上,同时把它连接到猫须,外部振动电机连接到猫须前端,内部振动电机连接到猫须的后端。
2、对每个振动马达的两端的进行焊接,每个连接处使用热收缩膜,并重复多次,确保连接处无误。将带魔术贴圆盘的那面固定在电机背面。重复操作三次。
3、切割一条魔术贴,将电机线绑在一起并固定到 Nitecore 头灯带的前面。
4、使用超级胶水将带子粘贴到头带内部的前面,使用魔术贴将电机固定在带子上,安装方向与猫须安装在托盘上的方向一致。
5、使用塑料锁扣固定住振动电机的线,防止振动马达的线被拉断。
连接到 Arduino
1、将所有的振动马达和猫须都将连接到 Arduino Uno。另外,你需要一个额外的原型板,它可以焊接九根 GND 线和四根 3.3V 电线。还需要一个连接器套件,将引脚和主体的电线直接插入到 Arduino 中。
2、将振动马达引脚线(红线)连接到 Arduino 数字引脚 3、9、10、11。将振动马达 GND 线(黑线或白线)焊接到原型板上。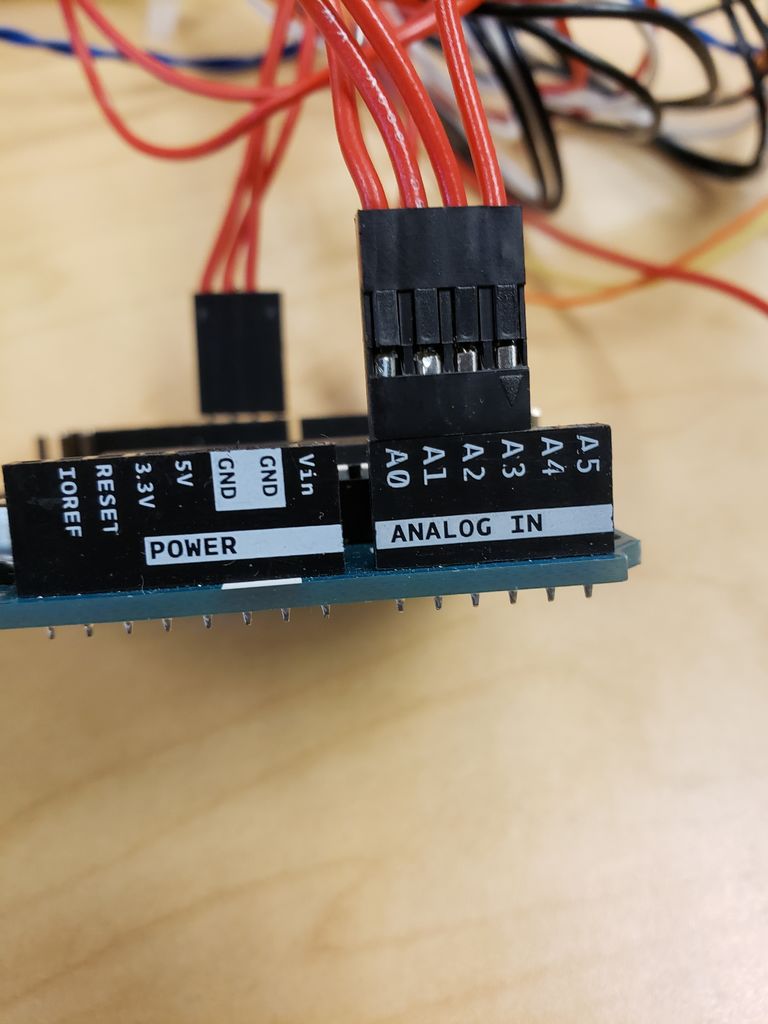
3、将猫须引脚(红线)连接到 Arduino 模拟排针 A0、A1、A2、A3。将猫须 VCC 线(白线)和接地线(黑线)焊接到原型板上。
编程
上传代码前,还需调整一下设备。
1、使用万用表测量 VCC 输出电压和 10k 电阻的数据值,并将这些值填入到代码中相应的位置。
2、仔细检查所有变量是否设置正确,检查输入或输出的数值(例如,mtr、flexADC 等)。
3、连接 Arduino,并上传代码。
4、跑起来后,串行监视器可以反映出弯曲的程度(猫须编号)。这时就可以校准猫须了,每根猫须都是独特的,每一个的基线电阻会略有不同。
5、将 STRAIGHT_RESISTANCE 变量设置为基线电阻(即没有弯曲时,猫须的位置)。将 BEND_RESISTANCE 变量设置为 STRAIGHT_RESISTANCE+30000.0。
6、在原始代码中,变量是反映的信息是 90 度弯曲柔性电流传感器时的电阻输出。一般情况下,猫须不能弯曲 90 度,因此在基准电阻上添加 30000.0 欧姆就可以了。 你也可根据自己的设备设置弯曲的阻力值。
7、如果设置正确,你会看到当猫须没有弯曲时,反映出的弯曲角度为 0 度。再根据激活振动马达的角度设置阈值。
代码文件请在项目文件库中下载。
https://make.quwj.com/project/150
完成
现在,你就可以戴上这个猫须感官增强仪,来以猫主子的独特器官来重新感受这个世界了。