详细说明

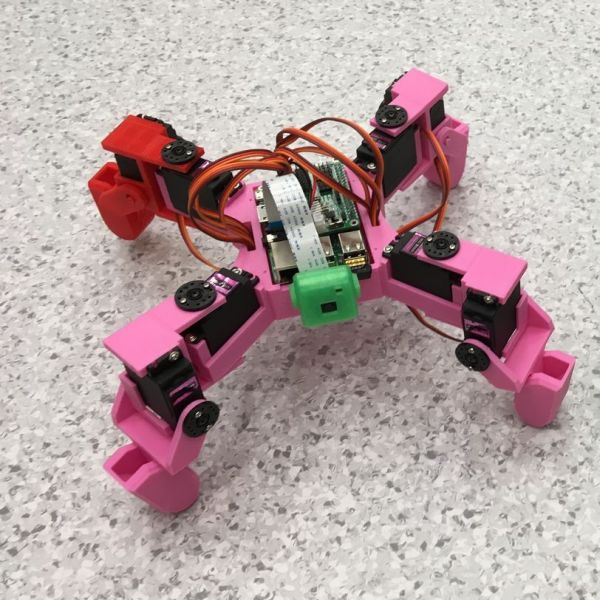
本项目是基于树莓派的八自由度的四脚摄像机器人,自带热点支持手机通过 WiFi 连接到机器人进行操控。机器人提供 Web UI 实现视频流的画面监控,效果见下面的视频。
链接表
文件库
big-stl.zip
[165951 Bytes at 2019-09-17, 167 次下载]
教程
组件清单
- 树莓派 B+ × 1
- WiFi USB 加密狗 × 1
- 树莓派摄像头 V1.3 × 1
- 树莓派 I/O 扩展板 × 1
- 3D 打印外壳 × 1
- 电机 × 1
- 3.7V 18650 电池组 × 1
材料清单
树莓派 B+×1
WiFi USB 加密狗×1
树莓派摄像头 V1.3×1
树莓派 I/O 扩展板×1
3D 打印外壳×1
电机×8
3.7V 18650 电池组×2
机器人系统 SD 卡镜像(基于 LEDE)
在构建机器人之前,请先打印好 3D 模型并为树莓派准备好 SD 卡
3D打印
3D 打印填充材料为 PLA。
层高:0.2mm
外壳厚度:1mm
底部和顶部厚度:1.2mm
填充密度:10%
STL 模型文件在项目文库下载 https://make.quwj.com/project/145 。
安装系统镜像
参考这个教程将下面3种镜像中的1种烧录到 SD 卡上(根据你的树莓派版本选择对应的镜像)。
http://shumeipai.nxez.com/2013/09/07/raspberry-pi-under-windows-system-installation-to-sd-card.html
镜像下载:
https://drive.google.com/file/d/0ByZam-eTh4SXQjRaRDVKaEw2NGs/view
https://drive.google.com/file/d/0ByZam-eTh4SXekRQWTZmYkNEMGs/view
https://drive.google.com/file/d/0ByZam-eTh4SXZkljZjl2SmhraVk/view
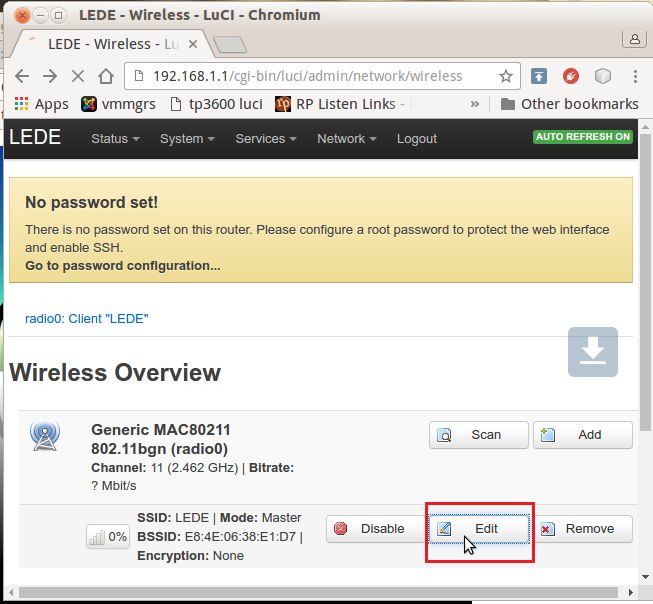
WiFi 设置
系统镜像安装到 SD 卡后,就可以开始设置 WiFi。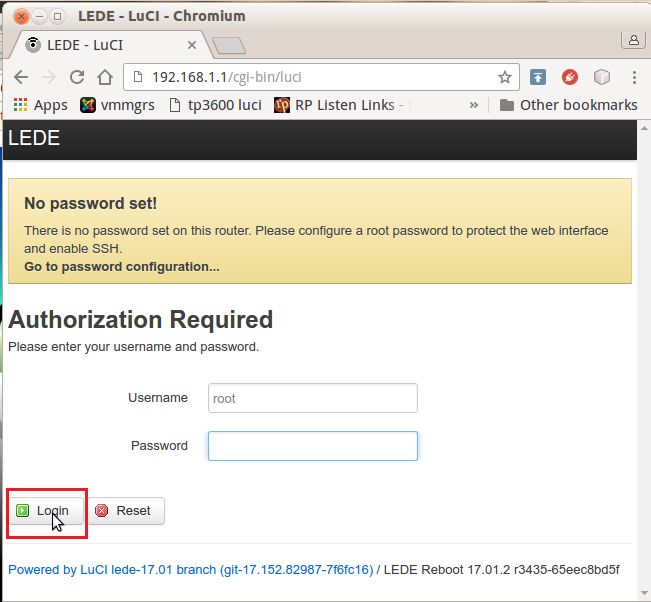
1、将计算机连接到树莓派的 LAN 端口。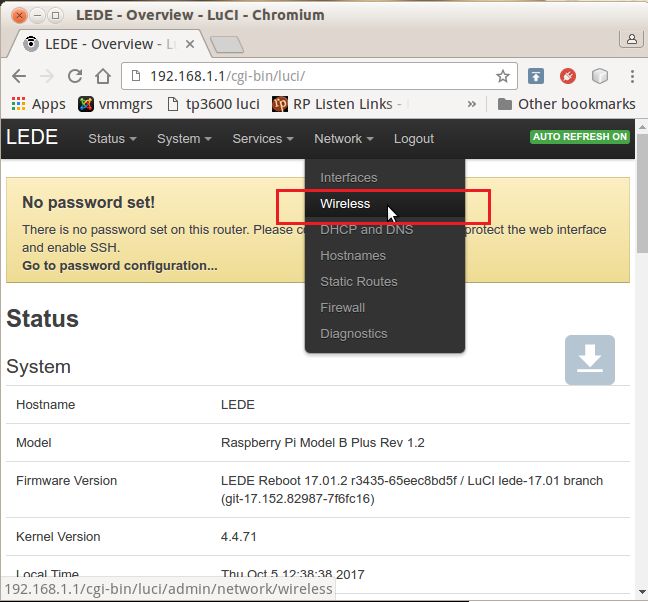
2、将树莓派连接到 HDMI 后启动消息(可选)。
3、将 USB WiFi 加密狗连接到 USB 端口(树莓派 3 除外)。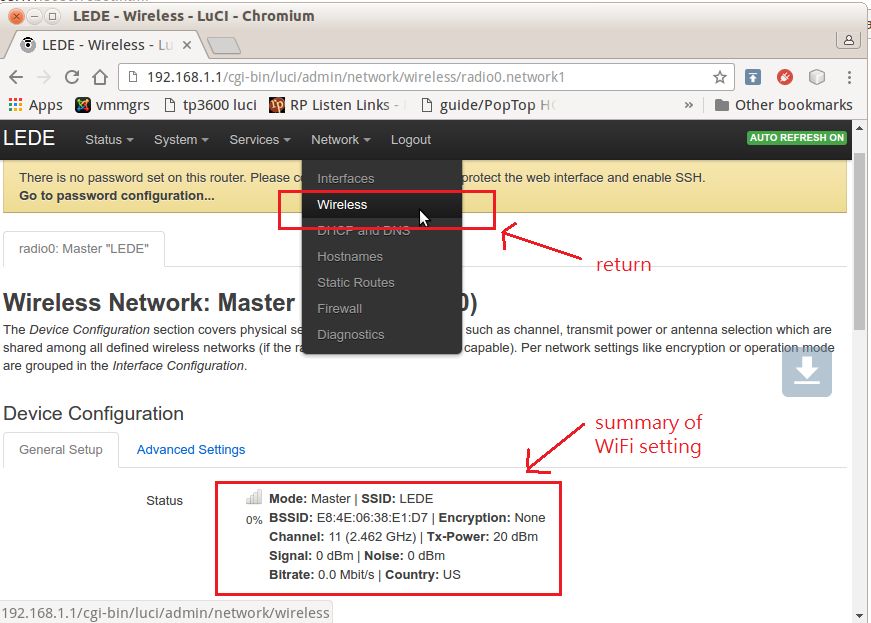
4、将 SD 卡插入树莓派。
5、打开树莓派,绿色 LED 灯将闪烁几秒钟。
5、启动后,树莓派变成 Internet 和 WiFi 的路由器,将在 http://192.168.1.1/ 范围内分配 IP 地址,通过 LAN 端口或 WiFi 连接到任何网络设备。
装配机器人并完成
1、加入机器人 WiFi 网络,最初 SSID 是 LEDE。
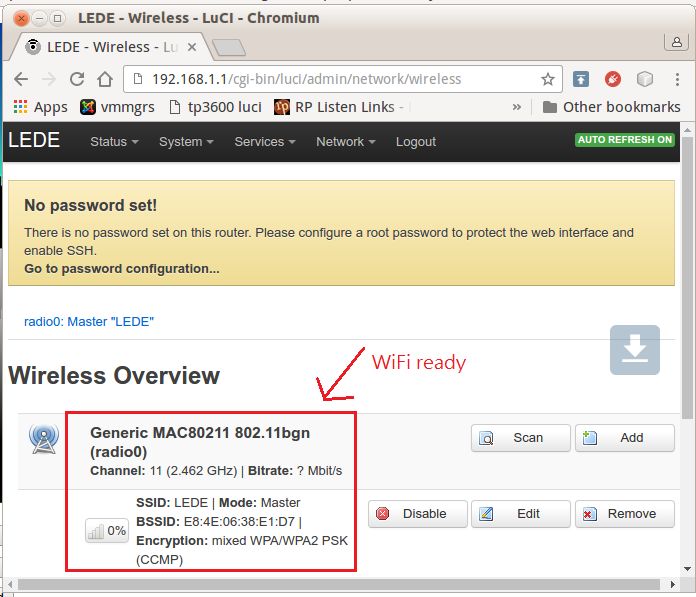
2、WiFi 密码设置请参考之前的步骤。成功加入 WiFi 网络,使用 URL http://192.168.1.1:8080/robot.html 访问 Web 控制界面。
现在你可以开始玩耍啦!