详细说明
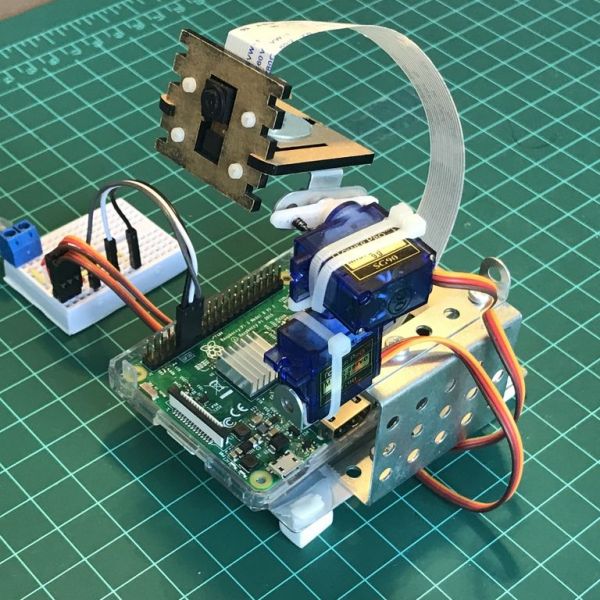
在这个项目中,我们将探讨如何在树莓派上使用Python控制多个舵机。 我们的目标是制作一个多自由度定位拍照(PiCam)的云台。在这里,你可以看到我们的成品是如何工作的。
链接表
文件库
RPi-Pan-Tilt-Servo-Control-master.zip
[7830 Bytes at 2018-06-21, 25 次下载]
教程
组件清单
- 树莓派3 × 1
- 摄像头模块 × 1
- 9G 180°微型舵机 × 2
- 迷你云台(2个舵机) × 1
- 电阻1K欧姆 × 2
- 金属部件 × 若干
- 固定带等 × 若干
主要材料
1、树莓派3 X1
2、摄像头模块 X1
3、9G 180°微型舵机 X2
4、迷你平移/倾斜照相机平台 防振照相机支架(2个舵机)
5、电阻1K欧姆 X2(可选)
6、金属部件
7、固定带等(用于构建云台平台)
你可以购买一个成品的云台平台舵机或自己制作。
PWM如何工作
树莓派不能直接输出模拟电信号,但我们可以使用PWM(脉宽调制)方法来模拟这一点。我们制作一个固定频率的数字信号,在那里我们将改变脉冲宽度,将“转换”改为“平均”输出电压的电平,如下图所示:
我们可以使用这个“平均”电压水平来控制LED亮度,例如:
请注意频率本身不是重点,而是“占空比”,即脉冲“高”的时间除以波周期之间的关系。例如,假设我们在树莓派的 GPIO上产生一个50Hz的脉冲频率。周期(p)将是频率的倒数或20ms(1 / f)。如果我们的LED达到“半”亮度,我们的占空比必须为50%,这意味着“脉冲”将是10ms的“高”。
这个原理对于我们来说非常重要,一旦使用“占空比”来定义舵机位置,如下所示,它用于控制舵机的位置。
安装部件


舵机将连接到外部5V电源,其数据引脚(我的项目中,黄色接线)连接到树莓派GPIO如下:
GPIO 17 ==>仰角舵机
GPIO 27 ==>平移舵机
不要忘记将GND连接在一起 ==> 树莓派 - 舵机 - 外部电源
你可以在树莓派的GPIO和服务器数据输入引脚之间串联一个1K欧姆的电阻。 如果发生舵机故障,这将保护你的树莓派。
舵机的校准



1、首先你要弄清楚你购买到的舵机的主要特点。在这个项目中,我使用的是Power Pro SG90。
以下是它的数据表,我们可以参考一下:
范围:180°
电源:4.8V(外部可使用USB 5VDC电源)
工作频率:50Hz(周期:20 ms)
脉冲宽度:从1ms到2ms
2、理论上,舵机运转的位置
初始位置(0°):1ms脉冲到数据终端。
中间位置(90°):1.5ms脉冲到数据终端。
最终位置(180°):2 ms脉冲到数据终端。
3、使用Python编写舵机位置,了解上述位置相应的“占空比”非常重要,我们来做一些计算:
初始位置==>(0°)脉冲宽度==> 1ms ==>占空比= 1ms / 20ms ==> 2.0%
中间位置(90°)==> 1.5 ms的脉冲宽度==>占空比= 1.5ms / 20ms ==> 7.5%
最终位置(180°)==> 2 ms的脉冲宽度==>占空比= 2ms / 20ms ==> 10%
所以占空比应该在2%到10%的范围内变化。
4、单独测试舵机
打开树莓派终端并以“sudo”启动你的 Python 3 shell 编辑器(你可能是“超级用户”来处理GPIO):
sudo python3在Python Shell上导入RPI.GPIO模块并作为GPIO:
import RPi.GPIO as GPIO定义你自己想要使用引脚编号方案(BCM或BOARD)。我用BOARD做了这个测试,所以我使用的引脚为物理引脚(GPIO 17 =引脚11和GPIO 27引脚13)。对我来说,很容易识别它们,并且在测试过程中不会犯错误(在最终的程序中,我将使用BCM)。按照自己的喜好来选择:
GPIO.setmode(GPIO.BOARD)定义你要使用的舵机引脚:
tiltPin=11如果你已经使用了BCM方案,相反的,将最后2个命令应该替换为:
GPIO.setmode(GPIO.BCM)
tiltPin=17现在,我们必须指定这个引脚将为“输出”
GPIO.setup(tiltPin, GPIO.OUT)而且,这个引脚上产生的频率,对于我们的舵机来说应该是50Hz:
tilt = GPIO.PWM(tiltPin, 50)现在,让我们开始在引脚上设置一个初始占空比(我们将它保持为“0”)的PWM信号:
tilt = start(0)现在,你可以输入不同的占空比值,观察舵机的运动。让我们从2%开始,看看会发生什么(我们观察舵机从“零位”开始):
tilt.ChangeDutyCycle(2)我项目的情况是,当我将占空比改为3%时,舵机进入零位。我观察到舵机停留在同一位置,开始以大于3%的占空比移动。所以,3%是我的初始位置(o°)。同样的情况发生在10%,我的舵机超过这个数值,最终达到13%。所以对于这个舵机,最终结果是:
0°==>占空比3%
90°==>占空比8%
180°==>占空比13%
完成测试后,你必须停止PWM并清理GPIO:
tilt= stop()
GPIO.cleanup()上面终端将打印出屏幕显示的数据,我两个舵机的结果非常的相似。你的范围可以不同。
创建 Python 脚本

正如我们在上一步所看到的那样,发送到我们舵机的PWM命令要与“占空比”相对应。但通常情况下,我们必须以角度作为参数来控制舵机。因此,我们必须将“角度”转换为我们工作周期中比较常见的常量,要被Pi所理解的。
怎么做?很简单!我们知道占空比范围从3%到13%,这相当于从0到180度范围内的角度。另外,我们知道这些变化是线性的,所以我们可以构建一个如上所示的比例模式。所以,给定一个角度,我们可以有一个相应的工作周期:dutycycle = angle/18 + 3
保存这个公式。 我们将在下一个代码中使用它。
我们来创建一个Python脚本来进行测试。 基本上,我们将重复我们之前在Python Shell上做的事情:
from time import sleep
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
def setServoAngle(servo, angle):
pwm = GPIO.PWM(servo, 50)
pwm.start(8)
dutyCycle = angle / 18. + 3.
pwm.ChangeDutyCycle(dutyCycle)
sleep(0.3)
pwm.stop()
if __name__ == '__main__':
import sys
servo = int(sys.argv[1])
GPIO.setup(servo, GPIO.OUT)
setServoAngle(servo, int(sys.argv[2]))
GPIO.cleanup()上述代码的核心是设置舵机和角度的函数。 该函数接收参数、舵机、 GPIO编号和舵机必须定位的角度值。 一旦这个函数的输入是“角度”,我们必须使用之前开发的公式将其转换为百分比的占空比。
脚本执行时,必须输入参数,舵机GPIO和角度。
例如:sudo python3 angleServoCtrl.py 17 45
上述命令会将舵机连接到GPIO 17并且以“仰角”45度定位。 一个类似的命令可以用于平移伺服控制(在“方位角”中位置为45度):sudo python angleServoCtrl.py 27 45
文件 angleServoCtrl.py 可以在我的 GitHub 下载。
平台移动机制

“平板”舵机将“水平”移动摄像机(“方位角”),而我们的“仰角”舵机将“垂直移动”(仰角)。
下图显示了云台机制的工作原理:
在项目进行过程中,我们不会走向“极端”,我们只能使用30到150度的云台机制。 这个范围足够用于相机。
平台机械结构






现在将两个舵机作为云台进行组装。 你可以在这里做两件事。 购买一个平台或根据您的需求构建自己的平台机制。
我做了一个样板出来,只是将两个舵机捆绑在一起,并用上图中所示的旧玩具的小金属件搭建起来。
组装电动云台组件




组装好云台机制后,请按照图片进行全面电气连接。
1、关闭你的Pi。
2、进行所有电气连接。
3、仔细检查它。
4、首先打开你的Pi。
5、如果一切正常,请给舵机供电。
本教程中我们不会将如何设置相机进行展开。
Python 脚本
让我们创建一个Python脚本来同时控制两个舵机:
from time import sleep
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
pan = 27
tilt = 17
GPIO.setup(tilt, GPIO.OUT) # white => TILT
GPIO.setup(pan, GPIO.OUT) # gray ==> PAN
def setServoAngle(servo, angle):
assert angle >=30 and angle <= 150
pwm = GPIO.PWM(servo, 50)
pwm.start(8)
dutyCycle = angle / 18. + 3.
pwm.ChangeDutyCycle(dutyCycle)
sleep(0.3)
pwm.stop()
if __name__ == '__main__':
import sys
if len(sys.argv) == 1:
setServoAngle(pan, 90)
setServoAngle(tilt, 90)
else:
setServoAngle(pan, int(sys.argv[1])) # 30 ==> 90 (middle point) ==> 150
setServoAngle(tilt, int(sys.argv[2])) # 30 ==> 90 (middle point) ==> 150
GPIO.cleanup()脚本执行时,必须输入参数,平移角度和倾斜角度。 例如:
sudo python3 servoCtrl.py 45 120上述命令将使“水平/倾斜”平台在“方位角”(水平角)和120度“仰角”(倾斜角)方向上定位为45°。 请注意,如果未输入任何参数,则默认平移和倾斜角度均为90°。
在下面你可以看到一些测试:
文件servoCtrl.py可以在我的GitHub下载。
服务器的环路测试
现在让我们创建一个Python脚本来自动测试所有的舵机:
from time import sleep
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
pan = 27
tilt = 17
GPIO.setup(tilt, GPIO.OUT) # white => TILT
GPIO.setup(pan, GPIO.OUT) # gray ==> PAN
def setServoAngle(servo, angle):
assert angle >=30 and angle <= 150
pwm = GPIO.PWM(servo, 50)
pwm.start(8)
dutyCycle = angle / 18. + 3.
pwm.ChangeDutyCycle(dutyCycle)
sleep(0.3)
pwm.stop()
if __name__ == '__main__':
for i in range (30, 160, 15):
setServoAngle(pan, i)
setServoAngle(tilt, i)
for i in range (150, 30, -15):
setServoAngle(pan, i)
setServoAngle(tilt, i)
setServoAngle(pan, 100)
setServoAngle(tilt, 90)
GPIO.cleanup()程序将自动从30°到150°两个角度进行循环。
结果如下:
我只连接了一台示波器来说明如前所述的PWM理论。
以上源代码 servoTest.py 可以在GitHub下载。
结语
一如既往,我希望这个项目能够帮助他人进入激动人心的电子世界!
有关详细信息和最终代码,请访问我的 GitHub 仓库:RPi-Pan-Tilt-Servo-Control