
详细说明

产品特性
采用了 Raspberry Pi 官方设计的 RP2040 微控制器芯片
搭载了双核 ARM Cortex M0 + 处理器,运行频率高达 133MHz 灵活时钟
内置了 264KB 的 SRAM 和 2MB 的板载 Flash
采用Type-C接口,紧跟时代潮流,无需纠结正反插
USB1.1 主机和设备支持
支持低功耗睡眠和休眠模式
可通过 USB 识别为大容量存储器进行拖放式下载程序
RP2040 的 29 个 GPIO 引脚引出(20 个可通过排针引出,其余仅可焊接引出)
2 个 SPI
2 个 I2C
2 个 UART
4 个 12 位 ADC
精确的片上时钟和定时器
温度传感器
片上加速浮点库



软件环境配置
为了方便在电脑上使用MicroPython开发Pico板,建议下载Thonny IDE。
下载 Thonny IDE 并按照步骤安装
安装完成之后,第一次要配置语言和主板环境,由于我们是为了使用Pico,所以注意主板环境选择Raspberry Pi 选项。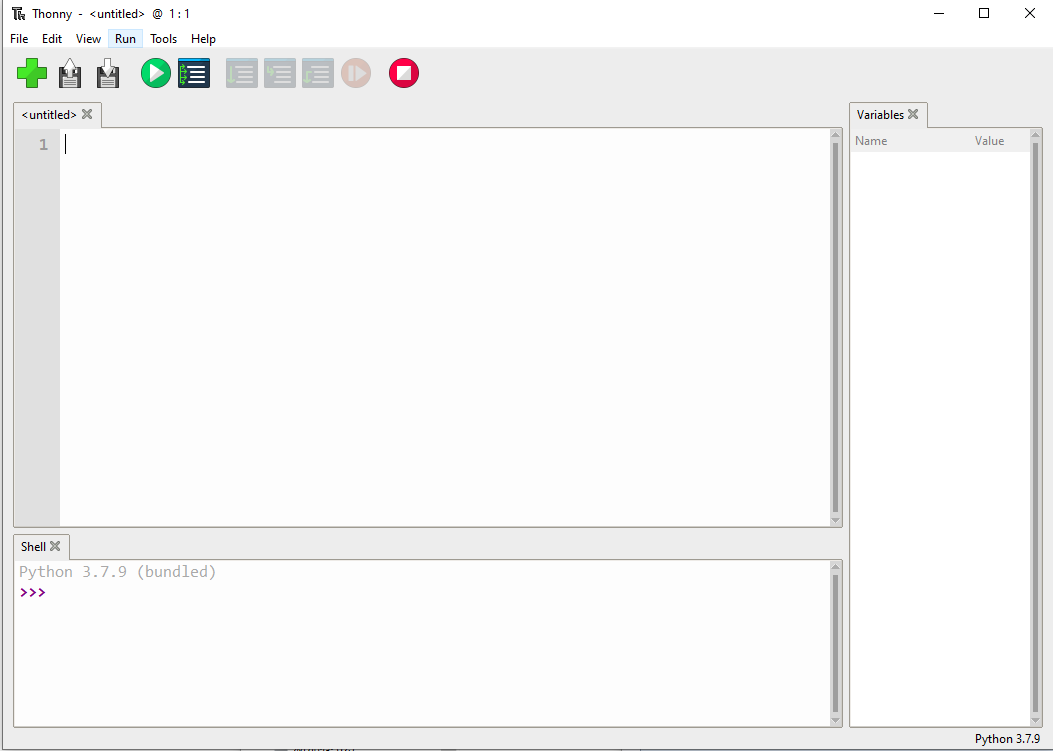
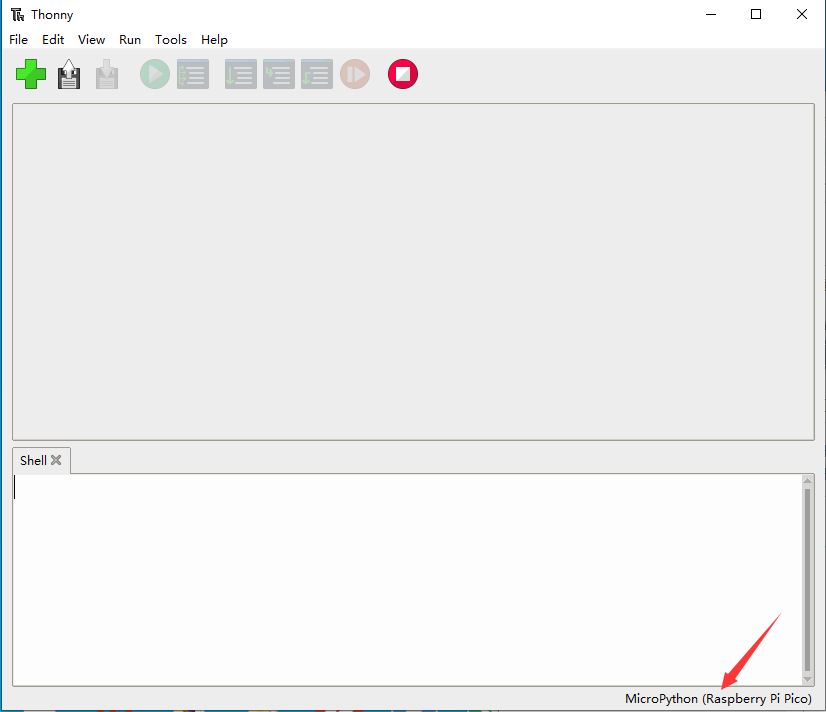
配置Micrpython环境及选择Pico端口。
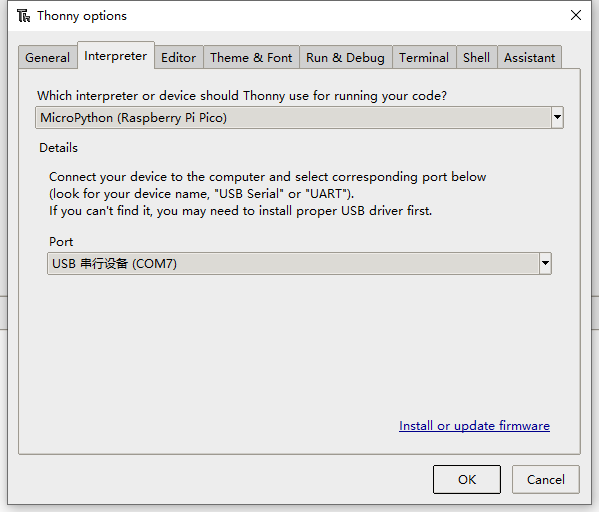
先将Raspberry Pi Pico 接入电脑,左键点击Thonny右下角的配置环境选项-->选择configture interpreter
在弹出的窗口栏中选择MicroPython(Raspberry Pi Pico),同时选择对应的端口。
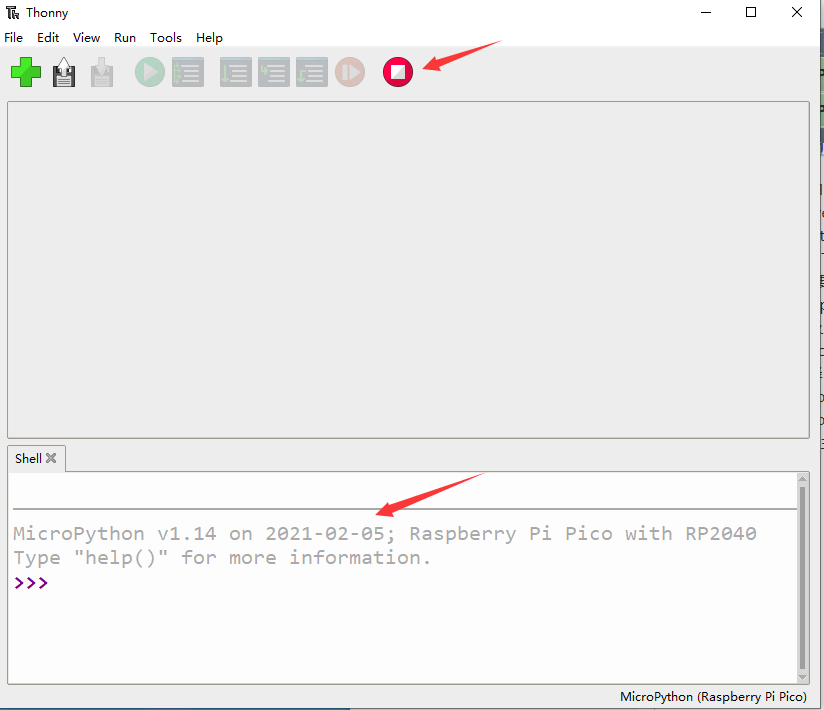
点击ok后返回到Thonny主界面,点击停止按钮,在Shell窗口中即可显示当前使用到的环境。
示例实验
下载示例程序到电脑桌面即可进行一些几个有趣的实验。
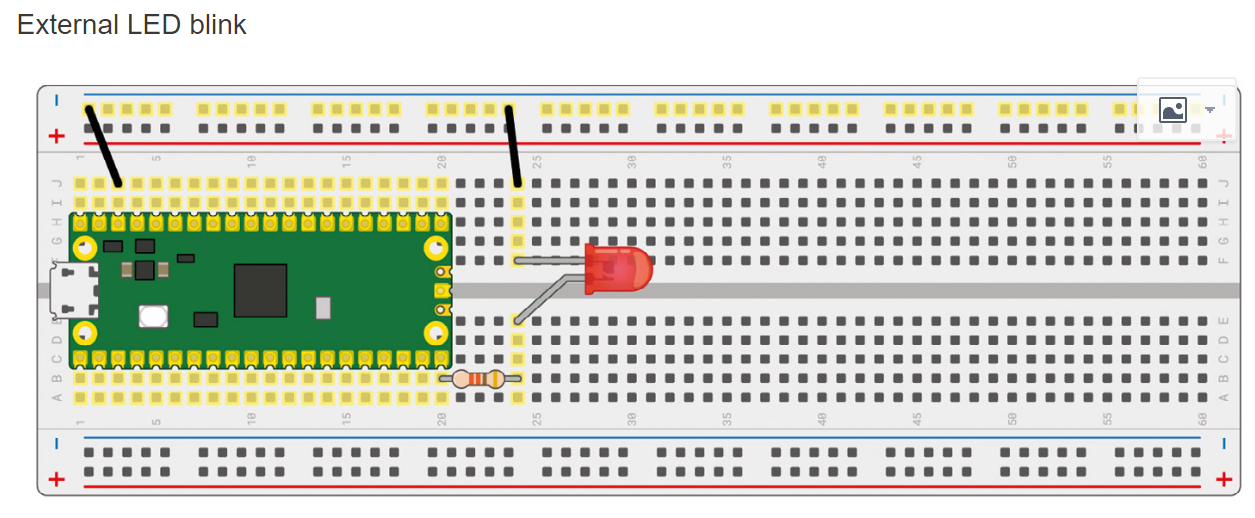
External LED 实验
按照下图连接好硬件,连接好接入电脑的Micro USB,在Thonny打开示例程序Lesson-5 External LED中的python文件,运行示例程序可以看到红灯有在闪烁的现象。
使用注意事项:LED较长的引脚为正极,较短的为负极,负极应该接GND,正极应该和GPIO输出口相连,使用时必须接上电阻。
代码解析
led_external = machine.Pin(15, machine.Pin.OUT) #设置GP15为输出模式
while True:
led_external.toggle() #每过5秒钟让LED灯的状态改变一次
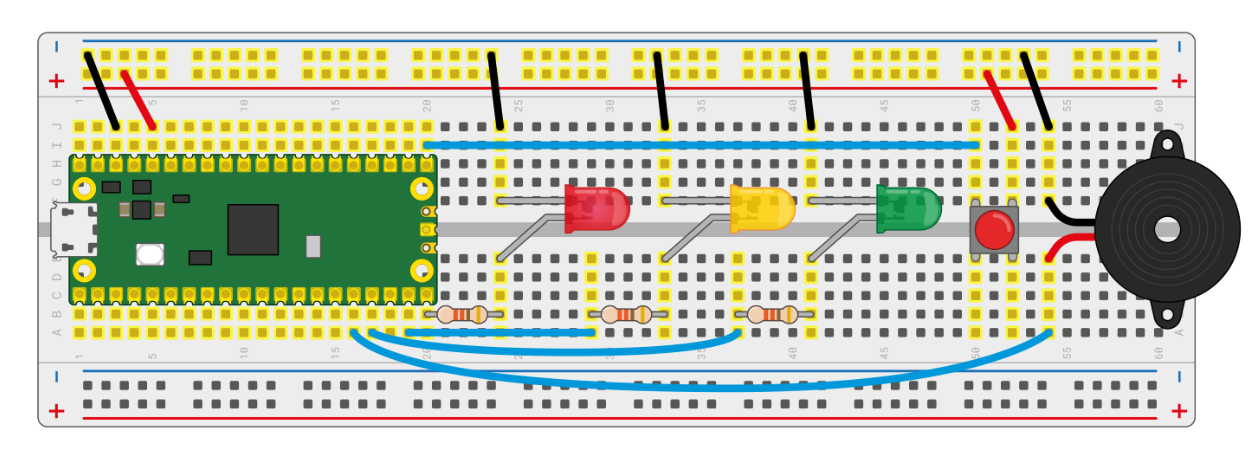
utime.sleep(5)Traffic Light System 实验
按照下图连接好硬件,连接好接入电脑的Micro USB,在Thonny打开示例程序Lesson-9 Traffic-Light-System中的python文件,运行程序可以看到交通灯带正常的运行,当按下按键时会触发蜂鸣器。
使用注意事项:LED较长的引脚为正极,较短的为负极,负极应该接GND,正极应该和GPIO输出口相连,使用时必须接上电阻;蜂鸣器的红线接GPIO口输出,黑线接GND。
代码解析
def button_reader_thread(): #检测按键是否被按下
global button_pressed
while True:
if button.value() == 1:
button_pressed = True
_thread.start_new_thread(button_reader_thread, ()) #用开启线程的方式去检测按键
while True:
if button_pressed == True: #如果按键被按下,红灯亮起,蜂鸣器响闹
led_red.value(1)
for i in range(10):
buzzer.value(1)
utime.sleep(0.2)
buzzer.value(0)
utime.sleep(0.2)
global button_pressed
button_pressed = False
led_red.value(1) #正常情况下红灯边绿灯时黄灯会亮两秒,然后黄灯和红灯灭,绿灯亮
utime.sleep(5) #由绿灯边红灯时,绿灯先灭,黄色亮两秒,然后红灯亮
led_amber.value(1)
utime.sleep(2)
led_red.value(0)
led_amber.value(0)
led_green.value(1)
utime.sleep(5)
led_green.value(0)
led_amber.value(1)
utime.sleep(5)
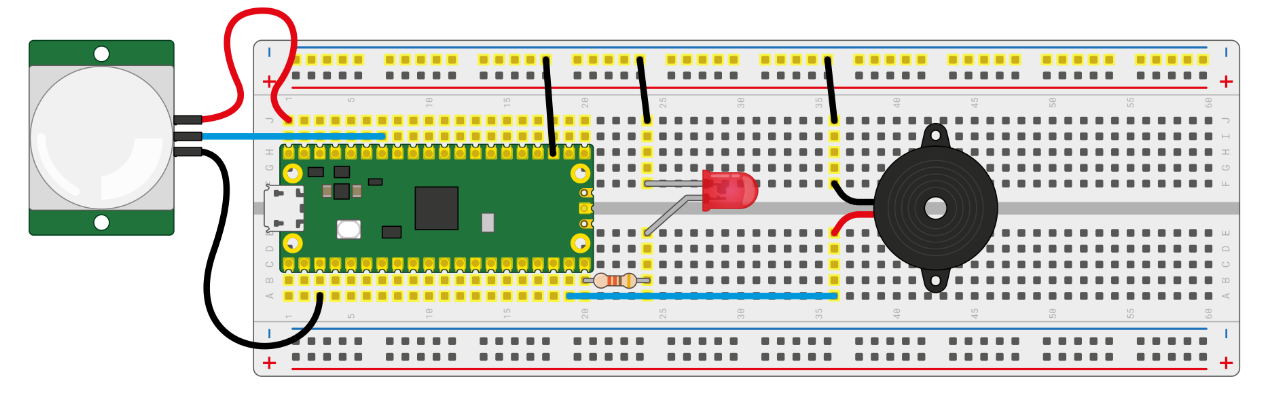
led_amber.value(0)Burglar Alarm LED Buzzer 实验
按照下图连接好硬件,连接好接入电脑的Micro USB,在Thonny打开示例程序Lesson-14 Burglar Alarm LED Buzzer中的python文件,运行程序可以看到,当人为的在Passive infrared sensor前晃动时,LED灯闪亮的同时蜂鸣器也会报警。
使用注意事项:Passive infrared sensor 的中间引脚为数据输出引脚,两边的引脚分别接入VCC和GND即可。
代码解析
def pir_handler(pin): #中断处理函数,蜂鸣器响,led快速闪烁
print("ALARM! Motion detected!")
for i in range(50):
led.toggle()
buzzer.toggle()
utime.sleep_ms(100)
sensor_pir.irq(trigger=machine.Pin.IRQ_RISING, handler=pir_handler)#开启中断,当人体传感器检测到异常时就会今天中断处理函数处理
while True: #无异常状态下会每隔5秒改变一次LDE的状态
led.toggle()
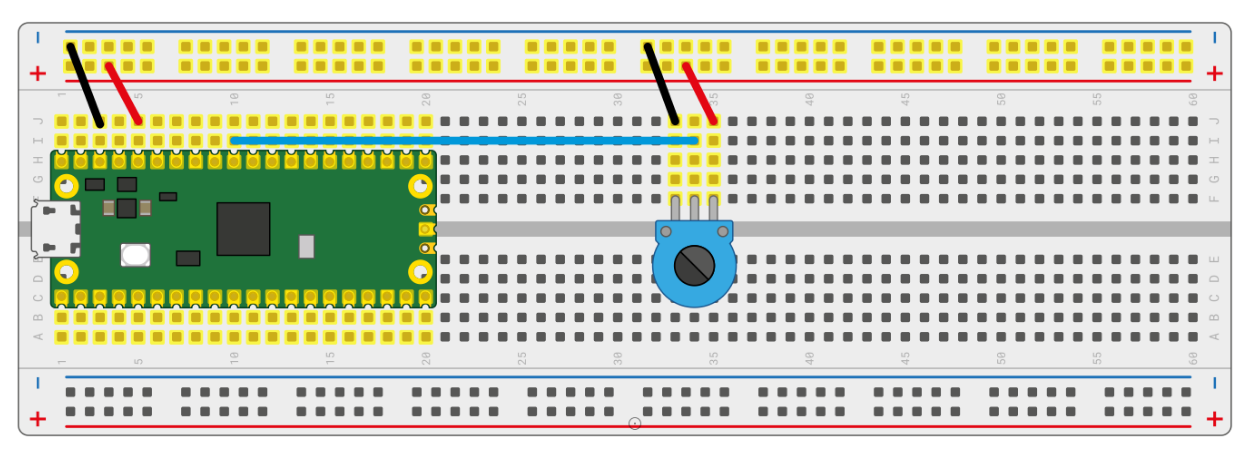
utime.sleep(5)Potentiometer 实验
按照下图连接好硬件,连接好接入电脑的Micro USB,在Thonny打开示例程序Lesson-16 Potentiometer中的python文件,运行程序,旋转电位器可以看到Sheel窗口中打印出来的电压值也在改变。
使用注意事项:Potentiometer的中间引脚为数据输出口,两边的引脚分别接上GND和VCC即可。
代码解析
potentiometer = machine.ADC(26) #将GP26作为模拟信号采集引脚
conversion_factor = 3.3 / (65535)
while True:
voltage = potentiometer.read_u16() * conversion_factor #将采集到的数据进行格式化转换成电压值
print(voltage) #打印电压信息,电压值会随着滑动变阻器旋转而变化
utime.sleep(2)WS2812 实验
按照下图连接好硬件,连接好接入电脑的Micro USB,在Thonny打开示例程序Lesson-25 WS2812中的WS2812_RGB_LED.py文件,运行程序可以一次看到蓝、红、绿、白的RGB颜色。

代码解析
#这一段代码使用到的是状态机机制,如下代码是一个装饰器,在装饰器中我们可以硬件进行初始化、设定引脚的电平等等。
#label("bitloop") 我们可以在代码中定义一下标记,方便我们通过跳转的方式跳到他们这里执行。
#jmp(not_x,"do_zero") 当x=0时,我们就调整到标签“do_zero”。
#nop() .set(0) [T2 - 1] 当x=0时,会跳转到这里执行。
@asm_pio(sideset_init=PIO.OUT_LOW, out_shiftdir=PIO.SHIFT_LEFT, autopull=True, pull_thresh=24)
def ws2812():
T1 = 2
T2 = 5
T3 = 1
label("bitloop")
out(x, 1) .side(0) [T3 - 1]
jmp(not_x, "do_zero") .side(1) [T1 - 1]
jmp("bitloop") .side(1) [T2 - 1]
label("do_zero")
nop() .side(0) [T2 - 1]
# Create the StateMachine with the ws2812 program, outputting on Pin(22).
sm = StateMachine(0, ws2812, freq=8000000, sideset_base=Pin(0)) #创建状态机
# Start the StateMachine, it will wait for data on its FIFO.
sm.active(1) #开始状态机
# Display a pattern on the LEDs via an array of LED RGB values.
ar = array.array("I", [0 for _ in range(NUM_LEDS)])
print(ar)
print("blue")
for j in range(0, 255):
for i in range(NUM_LEDS):
ar[i] = j
sm.put(ar,8) #put()的方法是将数据放入状态机的输出FIFO
time.sleep_ms(5)LCD1602 I2C 实验
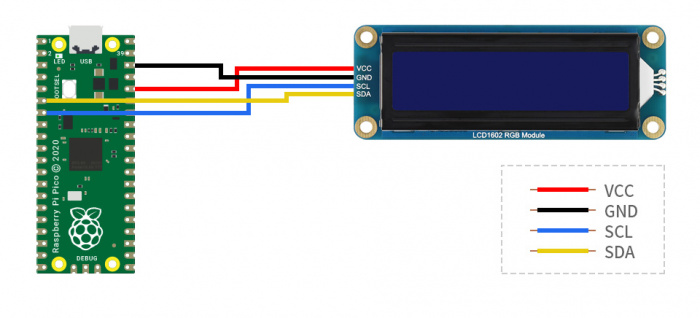
按照下图连接好硬件,连接好接入电脑的Micro USB,在Thonny打开示例程序Lesson-21 LCD1602 I2C中的python文件,先将RGB1602.py文件另存为Raspberry Pi Pico中,运行Choose_Color.py可以看到每5秒切换一种不同的颜色;运行Discoloration.py文件可以看到RGB颜色渐变的效果。
代码解析
Choose_Color.py
#定义颜色
rgb9 = (0,255,0) #青色’
lcd.setCursor(0, 0) #设置游标位置
# print the number of seconds since reset:
lcd.printout("Waveshare") #写入字符
lcd.setCursor(0, 1) #设置游标位置到第二行第零列
lcd.printout("Hello,World!")#写入字符
lcd.setRGB(rgb1[0],rgb1[1],rgb1[2]); #设置背光Discoloration.py
t=0
while True:
r = int((abs(math.sin(3.14*t/180)))*255); #RGB随着时间的变化而变化
g = int((abs(math.sin(3.14*(t+60)/180)))*255);
b = int((abs(math.sin(3.14*(t+120)/180)))*255);
t = t + 3;
lcd.setRGB(r,g,b);#重新设置RGB的值
# set the cursor to column 0, line 1
lcd.setCursor(0, 0) #定位到第一行第零列
# print the number of seconds since reset:
lcd.printout("Waveshare")#写入字符
lcd.setCursor(0, 1) #定位到第二行第零列
lcd.printout("Hello,World!")#写入字符
time.sleep(0.3)